Other classes¶
Remote Control¶
-
class
ev3dev.core.RemoteControl(sensor=None, channel=1)¶ EV3 Remote Controller
Event handlers
These will be called when state of the corresponding button is changed:
-
on_red_up¶
-
on_red_down¶
-
on_blue_up¶
-
on_blue_down¶
-
on_beacon¶
Member functions and properties
-
any()¶ Checks if any button is pressed.
-
beacon¶ Checks if beacon button is pressed.
-
blue_down¶ Checks if blue_down button is pressed.
-
blue_up¶ Checks if blue_up button is pressed.
Returns list of currently pressed buttons.
Check if currently pressed buttons exactly match the given list.
-
on_beacon= None Handles
Beaconevents.
-
on_blue_down= None Handles
Blue Downevents.
-
on_blue_up= None Handles
Blue Upevents.
-
static
on_change(changed_buttons)¶ This handler is called by process() whenever state of any button has changed since last process() call. changed_buttons is a list of tuples of changed button names and their states.
-
on_red_down= None Handles
Red Downevents.
-
on_red_up= None Handles
Red Upevents.
-
process()¶ Check for currenly pressed buttons. If the new state differs from the old state, call the appropriate button event handlers.
-
red_down¶ Checks if red_down button is pressed.
-
red_up¶ Checks if red_up button is pressed.
-
Beacon Seeker¶
-
class
ev3dev.core.BeaconSeeker(sensor=None, channel=1)¶ Seeks EV3 Remote Controller in beacon mode.
-
distance¶ Returns distance (0, 100) to the beacon on the given channel. Returns -128 when beacon is not found.
-
heading¶ Returns heading (-25, 25) to the beacon on the given channel.
-
heading_and_distance¶ Returns heading and distance to the beacon on the given channel as a tuple.
-
Button¶
-
class
ev3dev.ev3.Button¶ EV3 Buttons
Event handlers
These will be called when state of the corresponding button is changed:
-
on_up¶
-
on_down¶
-
on_left¶
-
on_right¶
-
on_enter¶
-
on_backspace¶
Member functions and properties
-
any()¶ Checks if any button is pressed.
-
backspace¶ Check if ‘backspace’ button is pressed.
Returns list of names of pressed buttons.
Check if currently pressed buttons exactly match the given list.
-
down¶ Check if ‘down’ button is pressed.
-
enter¶ Check if ‘enter’ button is pressed.
-
left¶ Check if ‘left’ button is pressed.
-
static
on_backspace(state) This handler is called by process() whenever state of ‘backspace’ button has changed since last process() call. state parameter is the new state of the button.
-
static
on_change(changed_buttons)¶ This handler is called by process() whenever state of any button has changed since last process() call. changed_buttons is a list of tuples of changed button names and their states.
-
static
on_down(state) This handler is called by process() whenever state of ‘down’ button has changed since last process() call. state parameter is the new state of the button.
-
static
on_enter(state) This handler is called by process() whenever state of ‘enter’ button has changed since last process() call. state parameter is the new state of the button.
-
static
on_left(state) This handler is called by process() whenever state of ‘left’ button has changed since last process() call. state parameter is the new state of the button.
-
static
on_right(state) This handler is called by process() whenever state of ‘right’ button has changed since last process() call. state parameter is the new state of the button.
-
static
on_up(state) This handler is called by process() whenever state of ‘up’ button has changed since last process() call. state parameter is the new state of the button.
-
process()¶ Check for currenly pressed buttons. If the new state differs from the old state, call the appropriate button event handlers.
-
right¶ Check if ‘right’ button is pressed.
-
up¶ Check if ‘up’ button is pressed.
-
Leds¶
-
class
ev3dev.core.Led(address=None, name_pattern='*', name_exact=False, **kwargs)¶ Any device controlled by the generic LED driver. See https://www.kernel.org/doc/Documentation/leds/leds-class.txt for more details.
-
brightness¶ Sets the brightness level. Possible values are from 0 to max_brightness.
-
brightness_pct¶ Returns led brightness as a fraction of max_brightness
-
delay_off¶ The timer trigger will periodically change the LED brightness between 0 and the current brightness setting. The off time can be specified via delay_off attribute in milliseconds.
-
delay_on¶ The timer trigger will periodically change the LED brightness between 0 and the current brightness setting. The on time can be specified via delay_on attribute in milliseconds.
-
max_brightness¶ Returns the maximum allowable brightness value.
-
trigger¶ Sets the led trigger. A trigger is a kernel based source of led events. Triggers can either be simple or complex. A simple trigger isn’t configurable and is designed to slot into existing subsystems with minimal additional code. Examples are the ide-disk and nand-disk triggers.
Complex triggers whilst available to all LEDs have LED specific parameters and work on a per LED basis. The timer trigger is an example. The timer trigger will periodically change the LED brightness between 0 and the current brightness setting. The on and off time can be specified via delay_{on,off} attributes in milliseconds. You can change the brightness value of a LED independently of the timer trigger. However, if you set the brightness value to 0 it will also disable the timer trigger.
-
triggers¶ Returns a list of available triggers.
-
-
class
ev3dev.ev3.Leds¶ The EV3 LEDs.
EV3 platform
Led groups:
-
LEFT¶
-
RIGHT¶
Colors:
-
RED¶
-
GREEN¶
-
AMBER¶
-
ORANGE¶
-
YELLOW¶
BrickPI platform
Led groups:
-
LED1¶
-
LED2¶
Colors:
-
BLUE¶
-
static
all_off()¶ Turn all leds off
-
static
set(group, **kwargs)¶ Set attributes for each led in group.
Example:
Leds.set(LEFT, brightness_pct=0.5, trigger='timer')
-
static
set_color(group, color, pct=1)¶ Sets brigthness of leds in the given group to the values specified in color tuple. When percentage is specified, brightness of each led is reduced proportionally.
Example:
Leds.set_color(LEFT, AMBER)
-
Power Supply¶
-
class
ev3dev.core.PowerSupply(address=None, name_pattern='*', name_exact=False, **kwargs)¶ A generic interface to read data from the system’s power_supply class. Uses the built-in legoev3-battery if none is specified.
-
max_voltage¶
-
measured_amps¶ The measured current that the battery is supplying (in amps)
-
measured_current¶ The measured current that the battery is supplying (in microamps)
-
measured_voltage¶ The measured voltage that the battery is supplying (in microvolts)
-
measured_volts¶ The measured voltage that the battery is supplying (in volts)
-
min_voltage¶
-
technology¶
-
type¶
-
Sound¶
-
class
ev3dev.core.Sound¶ Sound-related functions. The class has only static methods and is not intended for instantiation. It can beep, play wav files, or convert text to speech.
Note that all methods of the class spawn system processes and return subprocess.Popen objects. The methods are asynchronous (they return immediately after child process was spawned, without waiting for its completion), but you can call wait() on the returned result.
Examples:
# Play 'bark.wav', return immediately: Sound.play('bark.wav') # Introduce yourself, wait for completion: Sound.speak('Hello, I am Robot').wait() # Play a small song Sound.play_song(( ('D4', 'e3'), ('D4', 'e3'), ('D4', 'e3'), ('G4', 'h'), ('D5', 'h') ))
-
static
beep(args='')¶ Call beep command with the provided arguments (if any). See beep man page and google linux beep music for inspiration.
-
static
get_volume(channel=None)¶ Gets the current sound volume by parsing the output of
amixer get <channel>. If the channel is not specified, it tries to determine the default one by runningamixer scontrols. If that fails as well, it uses thePlaybackchannel, as that is the only channel on the EV3.
-
static
play(wav_file)¶ Play wav file.
-
classmethod
play_song(song, tempo=120, delay=50)¶ Plays a song provided as a list of tuples containing the note name and its value using music conventional notation instead of numerical values for frequency and duration.
It supports symbolic notes (e.g.
A4,D#3,Gb5) and durations (e.g.q,h).For an exhaustive list of accepted note symbols and values, have a look at the
_NOTE_FREQUENCIESand_NOTE_VALUESprivate dictionaries in the source code.The value can be suffixed by modifiers:
- a divider introduced by a
/to obtain triplets for instance (e.g.q/3for a triplet of eight note) - a multiplier introduced by
*(e.g.*1.5is a dotted note).
Shortcuts exist for common modifiers:
3produces a triplet member note. For instance e3 gives a triplet of eight notes, i.e. 3 eight notes in the duration of a single quarter. You must ensure that 3 triplets notes are defined in sequence to match the count, otherwise the result will not be the expected one..produces a dotted note, i.e. which duration is one and a half the base one. Double dots are not currently supported.
Example:
>>> # A long time ago in a galaxy far, >>> # far away... >>> Sound.play_song(( >>> ('D4', 'e3'), # intro anacrouse >>> ('D4', 'e3'), >>> ('D4', 'e3'), >>> ('G4', 'h'), # meas 1 >>> ('D5', 'h'), >>> ('C5', 'e3'), # meas 2 >>> ('B4', 'e3'), >>> ('A4', 'e3'), >>> ('G5', 'h'), >>> ('D5', 'q'), >>> ('C5', 'e3'), # meas 3 >>> ('B4', 'e3'), >>> ('A4', 'e3'), >>> ('G5', 'h'), >>> ('D5', 'q'), >>> ('C5', 'e3'), # meas 4 >>> ('B4', 'e3'), >>> ('C5', 'e3'), >>> ('A4', 'h.'), >>> ))
Important
Only 4/4 signature songs are supported with respect to note durations.
- Args:
- song (iterable[tuple(str, str)]): the song tempo (int): the song tempo, given in quarters per minute delay (int): delay in ms between notes
- Returns:
- subprocess.Popen: the spawn subprocess
- a divider introduced by a
-
static
set_volume(pct, channel=None)¶ Sets the sound volume to the given percentage [0-100] by calling
amixer -q set <channel> <pct>%. If the channel is not specified, it tries to determine the default one by runningamixer scontrols. If that fails as well, it uses thePlaybackchannel, as that is the only channel on the EV3.
-
static
speak(text, espeak_opts='-a 200 -s 130')¶ Speak the given text aloud.
-
static
tone(*args)¶ tone(tone_sequence)
Play tone sequence. The tone_sequence parameter is a list of tuples, where each tuple contains up to three numbers. The first number is frequency in Hz, the second is duration in milliseconds, and the third is delay in milliseconds between this and the next tone in the sequence.
Here is a cheerful example:
Sound.tone([ (392, 350, 100), (392, 350, 100), (392, 350, 100), (311.1, 250, 100), (466.2, 25, 100), (392, 350, 100), (311.1, 250, 100), (466.2, 25, 100), (392, 700, 100), (587.32, 350, 100), (587.32, 350, 100), (587.32, 350, 100), (622.26, 250, 100), (466.2, 25, 100), (369.99, 350, 100), (311.1, 250, 100), (466.2, 25, 100), (392, 700, 100), (784, 350, 100), (392, 250, 100), (392, 25, 100), (784, 350, 100), (739.98, 250, 100), (698.46, 25, 100), (659.26, 25, 100), (622.26, 25, 100), (659.26, 50, 400), (415.3, 25, 200), (554.36, 350, 100), (523.25, 250, 100), (493.88, 25, 100), (466.16, 25, 100), (440, 25, 100), (466.16, 50, 400), (311.13, 25, 200), (369.99, 350, 100), (311.13, 250, 100), (392, 25, 100), (466.16, 350, 100), (392, 250, 100), (466.16, 25, 100), (587.32, 700, 100), (784, 350, 100), (392, 250, 100), (392, 25, 100), (784, 350, 100), (739.98, 250, 100), (698.46, 25, 100), (659.26, 25, 100), (622.26, 25, 100), (659.26, 50, 400), (415.3, 25, 200), (554.36, 350, 100), (523.25, 250, 100), (493.88, 25, 100), (466.16, 25, 100), (440, 25, 100), (466.16, 50, 400), (311.13, 25, 200), (392, 350, 100), (311.13, 250, 100), (466.16, 25, 100), (392.00, 300, 150), (311.13, 250, 100), (466.16, 25, 100), (392, 700) ]).wait()
tone(frequency, duration)
Play single tone of given frequency (Hz) and duration (milliseconds).
-
static
Screen¶
-
class
ev3dev.core.Screen¶ Bases:
ev3dev.core.FbMemA convenience wrapper for the FbMem class. Provides drawing functions from the python imaging library (PIL).
-
clear()¶ Clears the screen
-
draw¶ Returns a handle to PIL.ImageDraw.Draw class associated with the screen.
Example:
screen.draw.rectangle((10,10,60,20), fill='black')
-
image¶ Returns a handle to PIL.Image class that is backing the screen. This can be accessed for blitting images to the screen.
Example:
screen.image.paste(picture, (0, 0))
-
shape¶ Dimensions of the screen.
-
update()¶ Applies pending changes to the screen. Nothing will be drawn on the screen until this function is called.
-
xres¶ Horizontal screen resolution
-
yres¶ Vertical screen resolution
-
Bitmap fonts¶
The Screen class allows to write text on the LCD using python
imaging library (PIL) interface (see description of the text() method
here).
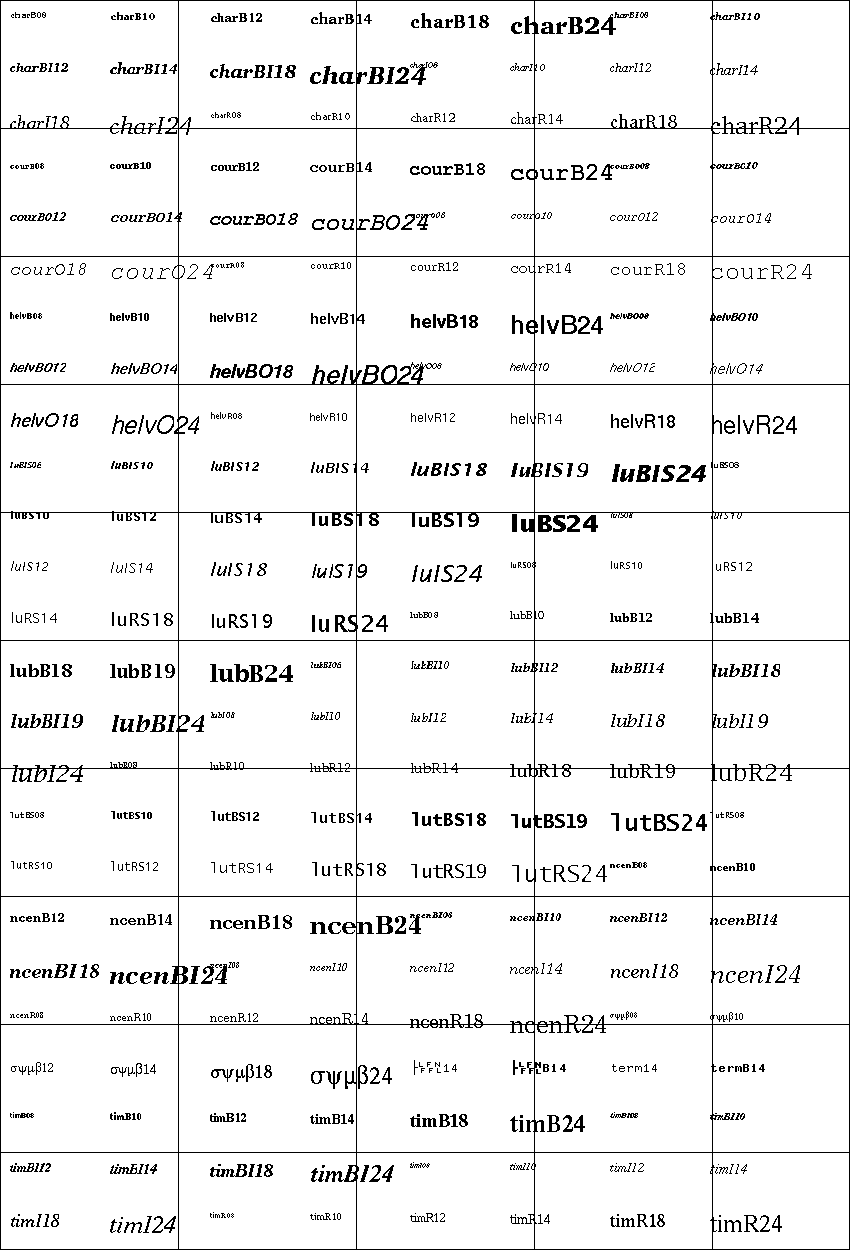
The ev3dev.fonts module contains bitmap fonts in PIL format that should
look good on a tiny EV3 screen:
import ev3dev.fonts as fonts
screen.draw.text((10,10), 'Hello World!', font=fonts.load('luBS14'))
-
ev3dev.fonts.available()¶ Returns list of available font names.
-
ev3dev.fonts.load(name)¶ Loads the font specified by name and returns it as an instance of PIL.ImageFont class.
The following image lists all available fonts. The grid lines correspond to EV3 screen size:
Lego Port¶
-
class
ev3dev.core.LegoPort(address=None, name_pattern='*', name_exact=False, **kwargs)¶ The lego-port class provides an interface for working with input and output ports that are compatible with LEGO MINDSTORMS RCX/NXT/EV3, LEGO WeDo and LEGO Power Functions sensors and motors. Supported devices include the LEGO MINDSTORMS EV3 Intelligent Brick, the LEGO WeDo USB hub and various sensor multiplexers from 3rd party manufacturers.
Some types of ports may have multiple modes of operation. For example, the input ports on the EV3 brick can communicate with sensors using UART, I2C or analog validate signals - but not all at the same time. Therefore there are multiple modes available to connect to the different types of sensors.
In most cases, ports are able to automatically detect what type of sensor or motor is connected. In some cases though, this must be manually specified using the mode and set_device attributes. The mode attribute affects how the port communicates with the connected device. For example the input ports on the EV3 brick can communicate using UART, I2C or analog voltages, but not all at the same time, so the mode must be set to the one that is appropriate for the connected sensor. The set_device attribute is used to specify the exact type of sensor that is connected. Note: the mode must be correctly set before setting the sensor type.
Ports can be found at /sys/class/lego-port/port<N> where <N> is incremented each time a new port is registered. Note: The number is not related to the actual port at all - use the address attribute to find a specific port.
-
address¶ Returns the name of the port. See individual driver documentation for the name that will be returned.
-
driver_name¶ Returns the name of the driver that loaded this device. You can find the complete list of drivers in the [list of port drivers].
-
mode¶ Reading returns the currently selected mode. Writing sets the mode. Generally speaking when the mode changes any sensor or motor devices associated with the port will be removed new ones loaded, however this this will depend on the individual driver implementing this class.
-
modes¶ Returns a list of the available modes of the port.
-
set_device¶ For modes that support it, writing the name of a driver will cause a new device to be registered for that driver and attached to this port. For example, since NXT/Analog sensors cannot be auto-detected, you must use this attribute to load the correct driver. Returns -EOPNOTSUPP if setting a device is not supported.
-
status¶ In most cases, reading status will return the same value as mode. In cases where there is an auto mode additional values may be returned, such as no-device or error. See individual port driver documentation for the full list of possible values.
-